“纳米机器人”是电影和科幻小说中的常客,一次又一次闪耀登场施展绝技。在许多人的印象中,它们就是缩小无数倍的变形金刚。
以“纳米机器人”为关键词,出现的搜索结果,画风都是酱婶的:

“史诗级”“划时代”“科技革命”,加持在“纳米机器人”上的这么多名号,到底几分真实,几分噱头?现实与科幻到底有多少差距?
为了解答这些疑问,今天我们就聊聊纳米级机器人的“真身”!
纳米机器人是啥?要怎么造?
关于纳米机器人,最初是从“尺寸”的角度进行定义:“在0.1-10微米之内的微型机器”。
后来,科学家们将这个概念进行了延伸,从“功能性”上将纳米机器人定义为“对纳米级物体进行操作的机器”。
无论如何定义,制造纳米机器人是一项非常艰巨的任务。
首先,我们需要一些小零件——相当小,可能只有发丝直径的千分之一。
2016年诺贝尔化学奖颁给了三位从事“设计分子机器”的学者。他们的主要工作就是使用化学合成法,做出了很多分子级零件,比如开关、泵和轴[1]。
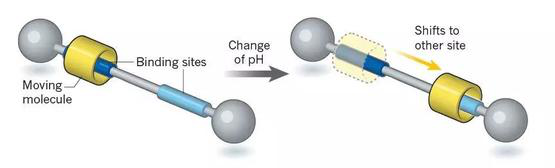
化学方法可以合成一系列分子级别零件:一个典型的纳米开关示意图,通过改变pH可以控制特定的分子进行移动 | 参考文献[1]
还有一些硬科技,可以用来造纳米零件,比如光刻技术。
光刻技术主要用于制造芯片,是人类掌握的少数几种可以实现纳米级精度的加工技术。美国加州理工学院科学家们采用光刻技术可以造出分辨率为25-100纳米的复杂三维金属几何图形[2]。2019年,美国劳伦斯•利弗莫尔国家实验室的科学家们开发了一种“飞秒投影双光子光刻”技术,可以将传统技术的加工速度提升1000倍,只需要8分20秒就可以打印出一个芝麻大小的微纳结构,加工精度保持在纳米级别[3]。
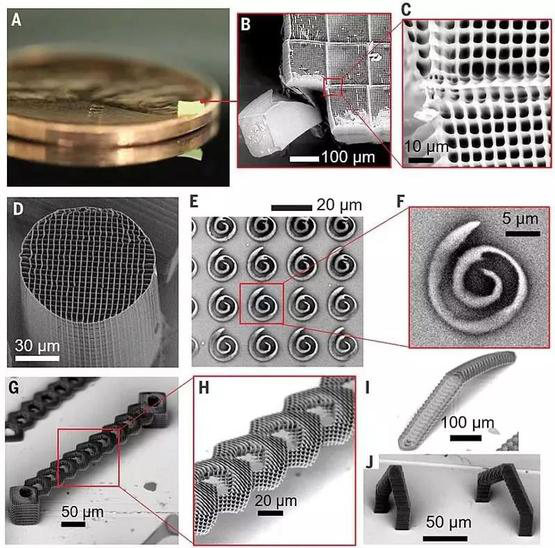
通过飞秒投影双光子光刻技术制造的复杂三维微观结构 | 参考文献[3]
无论是化学法或光刻法,制造出来的是纳米零件,这些零件需要进一步组装成机器人。如何实现微观尺度的组装,是“纳米机器人”研究的另一难关。
早在上世纪80年代,人们就实现了对单原子的控制。2005年,中国科学院成功将一个4微米长、100纳米粗的碳纳米管,准确地移动到了一个刻好的沟槽里[4]。然而,如何大规模进行纳米组装仍是问题。
2015年,法国国家科学院的一个研究小组,成功合成了一种长长的聚合链,通过超分子键把成千上万的纳米机器结合在一起,每个纳米机器都能产生约1纳米的线性伸缩运动。积少成多,这数万个小纳米机器的运动整合起来,可以使聚合链产生10微米的收缩舒张,就像肌肉组织中那样[5]。

积少成多:上万个纳米零件的协同运动,可以产生大尺度的变化 | 参考文献[5]
即便如此,这些研究也只是实现了“纳米零件”的简单聚合,真想要装配出电影中那种微如针尖的万能机器,人类还有很多路要走。
如何让纳米机器人动起来?
除了怎么“做出来”,还有一个关键问题,是如何让纳米机器人 “动起来”?
最直接的方式就是装个发动机。美国德克萨斯大学奥斯汀分校的科学家们造出了迄今世界上最小、最快的微型发动机。这个发动机比一粒盐要小500倍,能把电能转化为机械运动,速度可以达到每分钟18000转,相当于喷气式飞机上发动机的转速,而且能连续旋转15小时[8]。
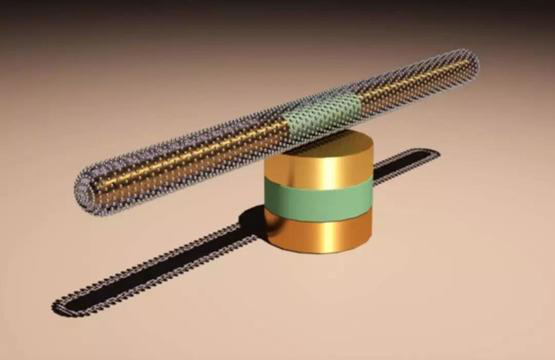
纳米发动机示意图 | 参考文献[8]
不过,别被这种高大上的宣传图骗到。实际上,这种纳米发动机只不过是一种成分为金、镍的纳米线,可以在电场作用下旋转。指望它能带动机器人,为时尚早。
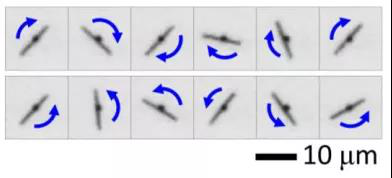
纳米发动机的真身不过是一个纳米线 | 参考文献 [8]
除了用电场,还能用磁场。来自MIT的科学家们借鉴了细菌鞭毛的模样,用3D打印技术造出了只有细胞大小螺旋状机器人,并称其为“人造细菌鞭毛”。这种螺旋形状可以帮助机器人更好地在血液中移动。之后他们在机器人的表面涂上了镍钛双涂层,使其具有磁性。他们能够通过外部磁场控制,人造细菌鞭毛的行动路线,使其在如同血管的通道中旋转和移动[9]。
也有学者脑洞大开,想到从能运动的细胞那里“借力”。德国的一个研究团队使用钛-铁纳米薄膜做出了一种空心管,之后他们控制精子钻到管子里,从而做出了一种精子驱动的纳米机器。因为纳米空心管的独特机构,精子的头会卡在里面,而尾巴仍然暴漏在外面。通过改变温度等条件,可以控制精子的移动路线和速度,从而控制这个“精子机器人”[10]。
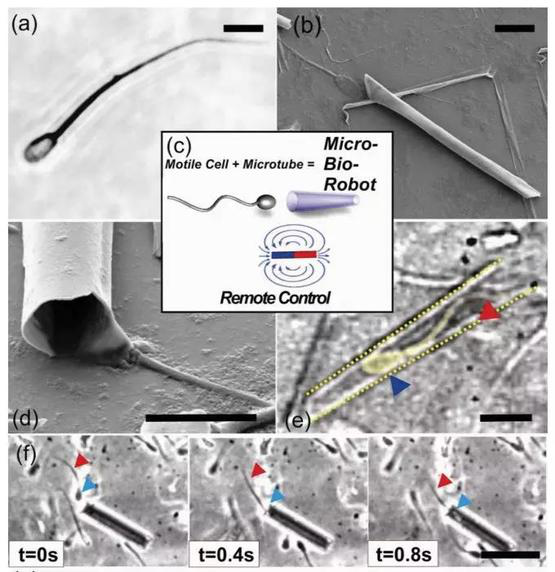
精子钻进纳米小管里,作为动力源 | 参考文献[10]
研究者用的是牛精子。在宏观世界里,牛就可以用于拉车。万万没想到,微观世界里,它们的精子还要做“纳米界的牛车”。
目前的纳米机器人能干什么?
纳米机器人最终目的,就是改善我们人类自身。
在2014年的影片《超验骇客》(Transcendence)中,男主角利用纳米机器人修复了自己重病的身体。2015年,谷歌技术总监雷·库兹韦尔(Ray Kurzweil)也曾提出一个观点:“2020年,人类的免疫系统将由纳米机器人进行接管;2030年,纳米机器人可以修正病原体,肿瘤等一系列免疫系统问题”。
不过,2020年近在眼前,目前来看这个时间表并不准确。电影中“一针灵治百病”式的纳米机器人也没有出现。
从血液到胃酸,如何让纳米机器人适应复杂的体液环境?在错综复杂的血管中,怎么定位或驱动如尘埃般大小的纳米机器人?在数百万的细胞中,怎样让纳米机器人识别出患病的那个?诚然,疾病治疗是纳米机器人最重要、也是投入最多的研究方向,但实际中的重重困难让这个领域步履蹒跚。
当然,技术的进步给这些问题提供了一些可能的解决方案。2019年,加州理工学院的科学家们把纳米机器人放在一个胶囊里并注射进生物体内。这层胶囊可以防止纳米机器人被胃酸等体液破坏。
随后,他们利用一种名为“光声断层扫描技术”在体外对这些纳米机器人进行了实时定位。当机器人胶囊抵达病患区域时,可以用外源近红外光穿过人体组织,引发胶囊破裂从而释放纳米机器人,这些机器人在病患区域的停留并释放药物。此外,也可以把能识别癌细胞的特定蛋白质修饰在纳米机器人上。注入体内之后,这些蛋白质可以作为“眼睛”,让纳米机器人分辨出癌细胞,以进行精确打击。
不过,这些研究都是在动物身上进行的。截至目前,市面上还没有真正成熟的纳米机器人医疗产品。
虽然还不能指望纳米机器人“治病救人”,不过,人们还是从纳米机器人身上找点乐子。
2017年,来自三大洲的6支队伍在法国南部进行了一场纳米车大赛[12][14]。赛道由黄金制成的,全长100nm。参赛者将驾驶单个分子进行比赛。全程使用扫描隧道显微镜等特殊设备产生电流,“推动”纳米小车前进。最后美国-奥地利联队以每小时35纳米取得了冠军。
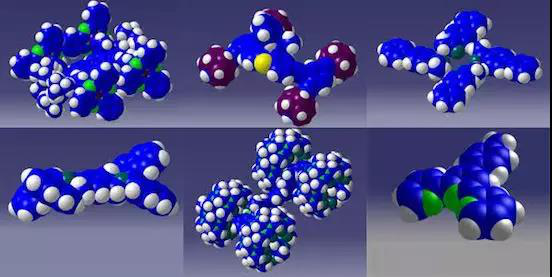
首届纳米车大赛参赛的“纳米车”示意图 | foresight.org
当然,这些到底是不是“车”,你也可以持保留意见的,但这场赛事背后的意义远不只“找乐子“这么简单。纳米车大赛实际上是挑战了人类对单分子的极限操控能力。科学家们也想借此引起人们对纳米机器的关注,他们甚至和国际汽联签署了合作协议来推动纳米车大赛的发展。
对于“纳米机器人”,虽然我们目前能看到的成品十分简单,有些甚至只能算是一些“纳米的小零件”。也许,将来的一天,生病的你来到医院,医生开出的方子上会写着:“注射5毫升纳米机器人,多喝热水”。
未来并不遥远,但也没那么近。希望技术的快速迭代,能早日让纳米机器人造福人类。(编辑:Yuki)
题图来源: Polytechnique Montréal
参考文献:
[1] Peplow, M. (2015). The tiniest Lego: a tale of nanoscale motors, rotors, switches and pumps. Nature News, 525(7567), 18.
[2] Vyatskikh, A., Delalande, S., Kudo, A., Zhang, X., Portela, C. M., & Greer, J. R. (2018). Additive manufacturing of 3D nano-architected metals. Nature communications, 9(1), 593.
[3] Saha, S. K., Wang, D., Nguyen, V. H., Chang, Y., Oakdale, J. S., & Chen, S. C. (2019). Scalable submicrometer additive manufacturing. Science, 366(6461), 105-109.
[4] http://www.cas.cn/ky/kyjz/200504/t20050410_1032191.shtml
[5] Du, G., Moulin, E., Jouault, N., Buhler, E., & Giuseppone, N. (2012). Muscle‐like supramolecular polymers: Integrated motion from thousands of molecular machines. Angewandte Chemie International Edition, 51(50), 12504-12508.
[6] Castro, C. E., Kilchherr, F., Kim, D. N., Shiao, E. L., Wauer, T., Wortmann, P., ... & Dietz, H. (2011). A primer to scaffolded DNA origami. Nature methods, 8(3), 221.
[7] Li, S., Jiang, Q., Liu, S., Zhang, Y., Tian, Y., Song, C., ... & Chang, Y. (2018). A DNA nanorobot functions as a cancer therapeutic in response to a molecular trigger in vivo. Nature biotechnology, 36(3), 258.
[8] Kim, K., Xu, X., Guo, J., & Fan, D. L. (2014). Ultrahigh-speed rotating nanoelectromechanical system devices assembled from nanoscale building blocks. Nature communications, 5, 3632.
[9] https://new.qq.com/omn/20190504/20190504A06FRH.html
[10]Magdanz, V., Sanchez, S., & Schmidt, O. G. (2013). Development of a sperm‐flagella driven micro‐bio‐robot. Advanced Materials, 25(45), 6581-6588.


