有没有比人更不擅长爬树的猴子?
不好意思,还真没有。别说猴子了,整个灵长类里都没有,连银背大猩猩都比我们强。虽然成年雄性银背大猩猩很少上树,但那不是攀爬能力的问题,主要是树不行。

金刚不爬树,只是没有合适它的树。图片来源:Wikipedia
身为一只灵长类动物,不擅长爬树也翻不过墙头,这确实有点对不起我们的古猿祖先。不过,人类学家们已经帮你把借口都想好了——现代人类之所以不长于攀爬,问题就出在适于直立行走的屁股上。
攀爬:灵长类的祖传手艺
如果我们的灵长类亲戚能看懂动作武打片,它们一定会觉得无聊透顶——那些竹林之巅高手对决的场景,不过是丛林生活的日常而已。就亲身体会而言,我曾在内伶仃岛保护区调查过野生猕猴种群。在印象里,我所见的猴子从不会正经爬树——它们在树冠间穿梭,从来都是在“飞行”。有时,快得甚至连影子都捕捉不到,只有一片穿林打叶声。除了猴子,看似笨重的类人大猿也多善于攀爬。而即使是在开阔草原上生活的狒狒,只要有机会上树,也会立马没影。
可以说,卓越的攀爬能力是灵长类家族的祖传技术,而要修炼此般功夫,又需要怎样清奇的骨骼呢?
少年,我看你骨骼里藏了套杠杆
不妨回想一下,在你爬梯子的时候,身体哪些部位在用劲?除非你是臂力惊人的单杠满分少年,否则下肢的配合是不可或缺的。攀爬和直立行走时用到的下肢肌肉很相似,无非都是在收腿伸腿,只是幅度不同,且攀爬多增加了蹲起动作。这其中,大腿部分发挥关键作用的肌肉,分别是股四头肌肌群(大腿前侧的肌肉)和腘绳肌群(大腿后侧的肌肉)。这两组肌肉都是一端连在骨盆上,一端固定在膝关节上。
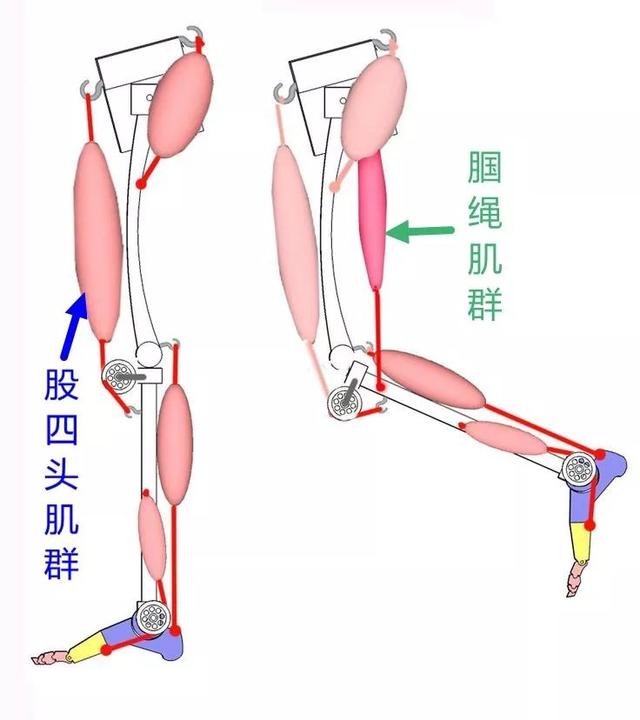
图中蓝色箭头所示的是股四头肌群,位于大腿正面。绿色箭头指示的是腘绳肌群,位于大腿后面。它们一端连在骨盆,一端固定在膝关节上,控制着下肢的行走与攀爬。图片来源:Pinimg.com
那么,在人类骚气地行走或者笨拙地攀登时,腿上这些零部件到底如何在工作?
就说爬梯子。
最开始,大腿前侧的肌群紧张收缩,带动股骨(大腿骨)以髋关节(大腿根)为轴心向前上方转动,提溜起膝盖;
同时,大腿后侧的肌群收缩,弯曲膝盖,脚踩住梯子的上一级横杆。
接下来,小腿固定不动,以膝盖为轴心,大腿前侧的肌群重新“拉直”膝关节;
同时,以髋关节为轴心,大腿后侧的肌群(和臀部肌群一起)向后拉”大腿,伸展髋关节,“撬”起身体,最终实现一个完整的攀爬动作[1]。
灵长类亲戚和人类的解剖结构基本一致,它们下肢的肌肉骨骼也是这么运转的。
眼尖的朋友可能看出来了,这一套下肢的运动方式,本质上悄然借用了杠杆原理。杠杆是股骨本身,支点则是髋关节。杠杆的动力来源自肌肉对股骨下端(靠近膝盖的一边)的拉扯,要克服的阻力是身体的重力。只不过,这个杠杆并不是跷跷板那样支点在中间的杠杆,它更像生活中另一种常见的杠杆:扳手。
股骨就好比“扳手柄”,髋关节就好比扳手转动的轴心,在腿部肌肉拉动扳手向上或者向下转动的过程中,人类或猴子大猿们就完成了迈步前进,或是在树林间攀援直上的动作。
显然,在大腿后侧肌群的拉动下伸展髋关节“撬”起身体是向上攀爬时重要的一环。而人类的爬树能力之所以在灵长类家族里不幸垫底,问题就出在这个由大腿后侧肌群、大腿骨和髋关节组成的“扳手”系统上[2]。
上树还是上路?鱼和熊掌难兼得
我们复习一下初中物理知识:杠杆的力臂越长越省力,力臂要是足够长就可以弹飞地球(当然也要有支点)。对于大腿后侧肌群、大腿骨和髋关节组成的这套“扳手”系统而言,力是由肌肉提供的,力臂当然是杠杆支点到肌肉的最小直线距离。
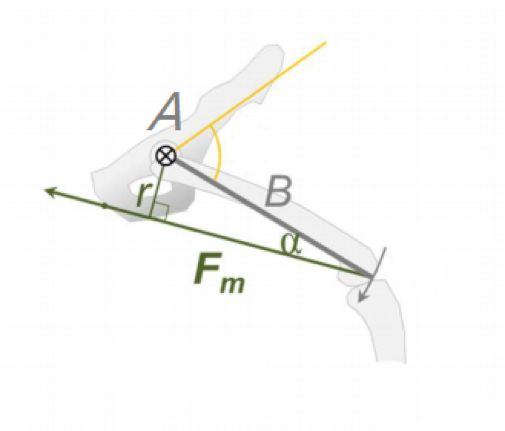
线段B代表了大腿股骨,A的小圆圈则是旋转中心髋关节,Fm代表了大腿后侧肌群的用力方向。所以,Fm到髋关节A的直线距离r就是力臂的长度了。图片来源:参考文献[2]
因为大腿后侧肌群在髋关节上的那一端固定坐骨上,所以坐骨的大小和形态,决定了这套“扳手”系统的力臂长短。对非人灵长类来说,坐骨普遍朝向身体后方,在四足匍匐着地时,坐骨的长短也决定了力臂的长度。换句话说,坐骨越长,力臂就跟着越长,攀爬时下肢运动的过程也就越省力。有这么好的结构,自然演化的力量当然不会放过——从猴子到大猿,坐骨形态无一例外都比人类更长。因此,在攀援活动中,它们的肌肉运动更加高效,一口气上树不费劲。
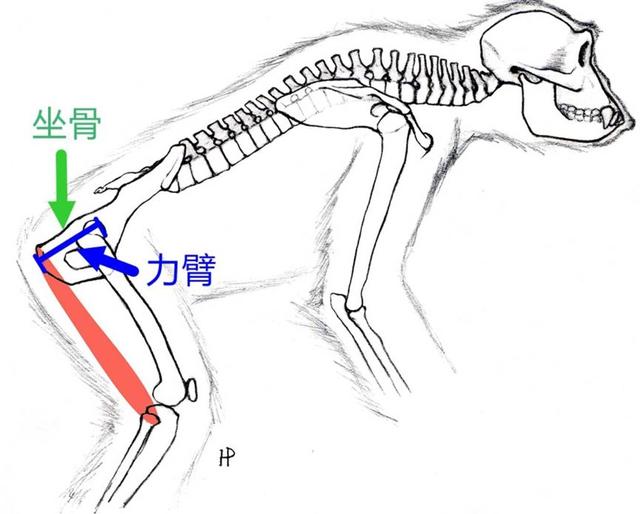
图中可以看到猿猴的坐骨、走向,以及大腿后侧肌群的力臂长度(蓝色线段)。在四足着地的姿态中,坐骨与力臂的方向一致,坐骨越长,力臂也就越长。图片来源:参考文献[2]
但是你肯定会问,如此优秀的骨骼结构,人类为什么不要了?因为相比于爬树,人类更需要直立行走。
如果让一只猩猩站直,你就会发现它的髋关节、坐骨和大腿后侧肌群的走向都几乎重合在了同一条直线上。换句话说,当一只猩猩站直的时候,大腿后侧肌群的力臂长度几乎归零!这意味着,肌肉提供的动力在这个姿势下就失效了。纽约市立大学的研究团队测量了十余种灵长类的下肢结构,发现这是极其普遍的现象。也就是说,用猴子和大猿们的坐骨结构行走,不仅不省力,反而是步履维艰。
再用我们的“扳手”模型理解一下:当猴子和大猿们试图站立行走,其实意味着施加在“扳手柄”(大腿股骨)上的力转变了方向——之前的力量方向与杠杆形成了交角,所以这个骨骼杠杆才会起作用,股骨才能转动。而现在,力量几乎是在沿着扳手把柄的长轴向前顶去。这种用力的劲只是在把股骨往正上方硬拽,而不能前后转动,当然是在做无用功。
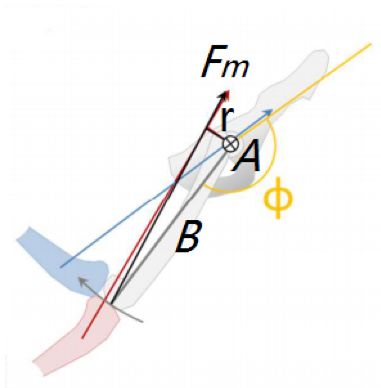
在非人灵长类中,当身体接近直立姿态时,髋关节A,股骨B,以及大腿后侧肌群用力方向Fm相距越来越近,力臂r变得非常短小。如果身体继续后仰,它们会重合在一起,而力臂r几乎归零。图片来源:见参考文献[2]
所以说,如果人类的坐骨依旧又长又朝屁股下方,那么我们就不要期望潇洒的步态了。既然上树和上路所需要的是完全不同的坐骨形态,那相比于非人灵长类,人类的坐骨又是怎么个创新的长法?怎么保证两足行走时也能昂首阔步呢?
研究人员在测量了地猿、南方古猿,以及现代人的坐骨形态后,找到了人类独特的坐骨变化趋势。地猿和南方古猿被认为是人类数百万年前的祖先,其中地猿生存年代最早,南方古猿相对晚一些。在地猿化石中,坐骨的走向轻微转向背侧,既保证了爬树的能力,也可以凑合着近似直立行走。南方古猿和现代人则完全不同了——他们的坐骨长度变短,也不再朝下,而是更极大地转朝向背侧。这样一来,大腿后侧肌群、坐骨、髋关节在直立状态下不再重合于同一条直线,很好地解决了灵长类直立行走时“力臂归零”的Bug。然而,现代人的爬树技巧也因此大打折扣。向上攀爬时,腿抬得较高,大腿后侧肌肉的力臂变得很短小。这就好像用扳手时不正经握住把柄尾巴,非要捏着扳手头部使劲,这当然会费力不讨好了。
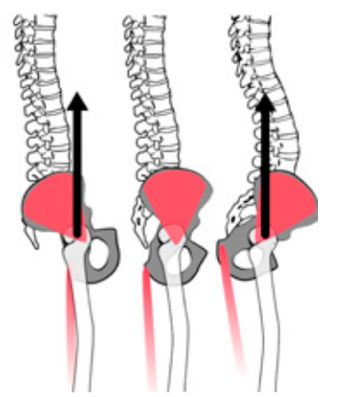
从左向右依次为地猿、南方古猿、现代人的骨盆结构,下方红色条带指示的是坐骨的位置。可以看见,坐骨在进化过程中越来越朝向背侧。(图片来源:见参考文献)
所以说,有得就有失的人间真理在自然演化中也同样适用。用祖传的爬树技巧换自创的直立行走,这笔交易也算是明智之举。毕竟这让我们得以走下树梢,创建文明。

出野外就会知道,相比于爬树,猴子们更爱爬的是你的三脚架(摄影:中山大学伍乘风)


